
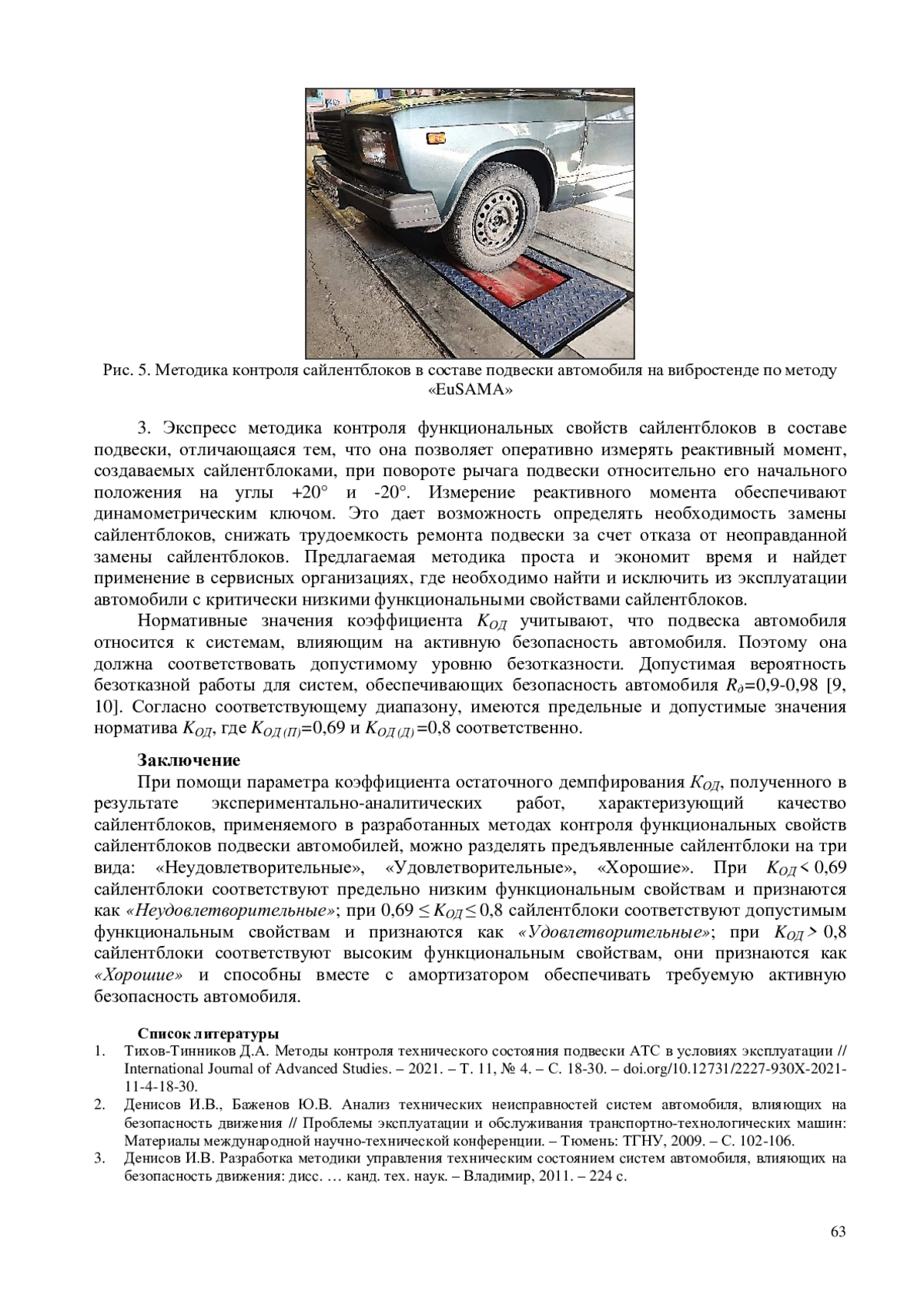
Неисправности элементов подвески автомобиля могут значительно влиять на активную безопасность автомобиля, например, снизить сцепление колеса с дорожной поверхностью. Существующие методы контроля элементов подвески, а именно сайлентблоков, не связаны с параметрами характеризующих их функциональные свойства, и не позволяют осуществлять контроль в условиях их жизненного цикла. В данной статье рассматриваются методики испытаний сайлентблоков подвески легковых автомобилей. Методы основаны на контроле функциональных свойств сайлентблоков подвески, реализующих процедуры измерения силовой реакции сайлентблоков на знакопеременные тестовые воздействия в виде поворота его наружной обоймы, относительно внутренней втулки на заданные углы. Приведены методы испытаний сайлентблоков подвески на стенде, реализующий режим статического и динамического нагружения, также на стенде реализующий метод «EUSAMA», и метод, основанный на измерении силовой реакции в условиях сервисных организаций.
Предпросмотр статьи

Идентификаторы и классификаторы
В последнее время все больше внимания уделяется активной безопасности автомобиля. Большинство дорожно-транспортных происшествий сопровождаются нарушением устойчивости, управляемости автомобилей, которые в свою очередь зависят от характеристик подвески и их элементов [1, 2]. Наиболее важными элементами подвески, обеспечивающими стабильность контакта шин автомобиля с дорогой, являются амортизаторы и сайлентблоки подвески. Характеристики подвески и ее элементов оказывают существенное влияние на показатели активной безопасности транспортных средств [3-5].
Список литературы
1. Тихов-Тинников Д.А. Методы контроля технического состояния подвески АТС в условиях эксплуатации // International Journal of Advanced Studies. – 2021. – Т. 11, № 4. – С. 18-30. – doi.org/10.12731/2227-930X-2021- 11-4-18-30.
2. Денисов И.В., Баженов Ю.В. Анализ технических неисправностей систем автомобиля, влияющих на безопасность движения // Проблемы эксплуатации и обслуживания транспортно-технологических машин: Материалы международной научно-технической конференции. – Тюмень: ТГНУ, 2009. – С. 102-106.
3. Денисов И.В. Разработка методики управления техническим состоянием систем автомобиля, влияющих на безопасность движения: дисс. … канд. тех. наук. – Владимир, 2011. – 224 с. 64
4. Калачев С.М. Экспериментально-расчетный метод контроля качества работы гасящих устройств подвески автомобиля: дисс. … канд. тех. наук. – М., 2006. – 170 с.
5. Кузнецов Н.Ю. Контроль технического состояния автомобильных амортизаторов на основе характеристик сцепления шин с опорной поверхностью: дисс. … канд. тех. наук. – Иркутск, 2019. – 221 с.
6. Барадиев В.С., Тихов-Тинников Д.А. Экспериментальное исследование силовых характеристик автомобильных сайлентблоков // Безопасность колесных транспортных средств в условиях эксплуатации: Материалы 99-й Международной научно-технической конференции – Иркутск: Иркутский национальный исследовательский технический университет, 2017. – С. 12-20.
7. Барадиев В.С., Тихов-Тинников Д.А., Федотов А.И., Алексеев А.В. Математическая модель процесса функционирования сайлентблока на основе элементов Гука и Сен-Венана // Вестник Сибирского государственного автомобильно-дорожного университета. – 2019. – Т. 16, № 6(70). – С. 706-716. – doi.org/10.26518/2071-7296-2019-6-706-716.
8. Барадиев В.С. Математическая модель процесса изменения амплитудно-частотной характеристики подвески автомобиля в виброрежиме при изменении технического состояния сайлентблоков // International Journal of Advanced Studies. – 2022. – Т. 12, № 1. – С. 76-91. – DOI: 10.12731/2227-930X-2022-12-1-76-91.
9. Кузнецов Е.С., Болдин А.П., Власов В.М. и др. Техническая эксплуатация автомобилей: Учебник для вузов. 4-е изд., перераб. и дополн. – М.: Наука, 2001. – 535 с.
10. Кузнецов Е.С. Управление технической эксплуатацией автомобилей. – 2-е изд., перераб. и доп. – М.: Транспорт, 1990. – 272 с.
Выпуск
Другие статьи выпуска

За последние десятилетия качество геологического изучения россыпных месторождений снизилось, поэтому при их разработке все чаще имеют место значительные отступления от установленного проектом уровня добычи. В связи с этим в проектную документацию вносятся неоднократные изменения. Вместе с тем нормативно-технической документацией допускается в проектах на разработку месторождений устанавливать некоторое допустимое отклонение от запланированного уровня добычи. При этом величина отклонения должна быть обоснована. Из всех причин фактического отклонения от установленного проектом уровня добычи, наиболее прогнозируемой является зависимость величины возможного отклонения от степени изменчивости параметров месторождения и объемов разрабатываемых блоков. Допустимое отклонение уровня добычи предлагается устанавливать через ошибки аналогии, за меру ошибки аналогии показателей рекомендуется принимать среднеквадратичную величину случайной изменчивости, для определения которой используется метод последовательных разностей. Данная методика была апробирована на нескольких россыпях, с установлением допустимых отклонений в пределах 20-35% для песков и 30-45% для торфов, что в целом соответствует опыту работы горных предприятий при разработке анализируемых россыпей.

В статье рассмотрена актуальная задача поддержания скорости потока закладочной гидросмеси выше критических значений, что способствует достижению условий стабильной и эффективной ее подачи на дальние расстояния. Для исследования потока выполнено 3D моделирование течения неньютоновской жидкости, позволившее оценить степень влияния поэтапного изменения (уменьшения) диаметра трубы на формирование ядра потока и выделить характерные зоны структуры потока, формируемых по длине рассматриваемых участков. Представлены отличительные особенности распределения полей скорости по сечению трубы при прохождении сужения, с целью сохранения однородности потока за счет поддержания кинетической энергии. Полученные результаты являются основой для обоснования выбора соотношений диаметров трубопроводной системы закладочного комплекса при перемещении гидросмесей с различными реологическими свойствами.

Решение об эксплуатации на месторождении беспилотной техники способно положительно влиять на процессы открытых горных работ, уменьшая капитальные и эксплуатационные расходы, обеспечивая безопасность ведения добычи и сокращая экологический ущерб, наносимый предприятием. Одним из ключевых преимуществ использования роботизированной техники является возможность корректировки параметров систем разработки месторождений. Авторами выявлены основные факторы, на которые может оказать влияние применение беспилотного транспорта на карьере. Проанализирован мировой опыт применения роботизированной техники на месторождениях, разрабатываемых открытым способом. Исследовано влияние изменения уклона карьерной автодороги на длину капитальной схемы вскрытия. Установлена зависимость изменения производительности, при увеличении длины транспортирования при изменении доли рабочего времени, а также установлена связь с необходимым рабочим парком оборудования. Проанализировано влияние изменения угла откоса уступа на коэффициент вскрыши

Показано, что качество и своевременность проведения мероприятий технического обслуживания и ремонта в значительной степени влияют на интенсивность отказов экскаваторов. Представлен статистический анализ и оценка весомости отказов ресурсоопределяющих систем карьерного гусеничного экскаватора ЭКГ- 20КМ горнорудных предприятиях республики Узбекистан и Росси. Основываясь на статистиках материале, приведены процентные доли отказов, производящиеся на рабочее оборудование и главные привода, построены структурные схемы надежности привода напора и подъема экскаватора ЭКГ-20КМ. Показан перечень диагностических процедур контроля технического состояния механических систем и подсистем экскаватора, а также предложена стратегия оценки весомости отказов с использованием принципов Файна-Кинни. Для эффективной технологии учета технического обслуживание и ремонта предложена цифровизация целевых работ для экскаваторов ЭКГ, представлен перечень кодированных видов работ в рамках системы добросовестного технического обслуживания CM&R.

Развитие минерально-сырьевой базы в регионах Дальнего Востока находится под влиянием существующего состояния транспортной и энергетической инфраструктур. На территории Дальнего Востока, можно выделить сотни значимых действующих, строящихся и планируемых проектов, которые определяют расположение точек генерации грузовой базы, вывоз сырья или продуктов обогащения, который осуществляется практически всеми видами транспорта. Необходима взаимоувязка проектов строительства транспортной инфраструктуры с возможностями природопользования и, в первую очередь, недропользования, поскольку горная промышленность для субъектов Дальнего Востока России является одним из основных направлений в экономике. Минерально-сырьевой потенциал нашей страны способен обеспечить все необходимые задачи национальной экономики и национальной безопасности исходя из стратегических целей при любых сценариях развития мировой ситуации. В качестве объединяющего центра может рассматриваться Хабаровский край с умеренно развитой инфраструктурой, но с очень высоким потенциалом её формирования. В Хабаровском крае в последние годы начинает формироваться транспортно-энергетический каркас, который может служить реальной основой реализации других проектов.

В статье рассматриваются вопросы, связанные с разработкой и применением систем, направленных на повышение безопасности и комфорта вождения. Авторы представляют одномерный подход к моделированию таких систем, который позволяет упростить анализ и оптимизацию их работы. Дается описание основных принципов одномерного моделирования и архитектуры устройства беспилотного автомобиля. Приводятся примеры использования этого подхода для разработки систем помощи водителю, которые включают в себя адаптивный круиз-контроль, системы предупреждения о столкновении, выполнение маневра смены полосы и другие функции. Особое внимание уделяется тестированию разработанной системы в различных дорожных сценариях, имитирующих движение по автомагистрали, с целью проверки ее эффективности. Результаты исследования носят практический характер и будут полезны инженерам и разработчикам, в сферу интересов которых входят повышение безопасности и автоматизация управления транспортными средствами.

Создание новых и модернизация существующих погрузочно-разгрузочных машин позволяет значительно сократить простои под погрузкой транспортно-технологических средств, повысить производительность комплексов и систем машин, снизить затраты труда при строительстве объектов транспортной инфраструктуры. Эффективность погрузчика определяется работоспособностью его рабочих органов и особенностью их взаимодействия с различными насыпными грузами. Погрузчики непрерывного действия, выпускаемые в настоящее время производителями погрузочной техники, отличаются характером движения рабочих органов, их количеством, взаимным расположением, конструктивным исполнением, а также способом воздействия на груз. Большое разнообразие конструктивно-технологических схем рабочих органов, осуществляющих захват, отделение и транспортирование материала, направлено на достижение максимальной производительности. Вместе с тем, увеличение производительности погрузочного средства без исследования мощности на привод рабочих органов, ведет к повышению энергоемкости процесса погрузки в целом. В статье рассматривается вопрос влияния пути, который проходит материал, взаимодействуя с рабочими органами погрузочного средства, на энергоемкость. Приводятся исследования характера движения груза на отдельных участках рабочих органов погрузчика, с учетом особенностей свойств насыпных грузов. Получены выражения для определения мощности на привод, энергоемкости в зависимости от траектории движения груза на каждом отдельном участке его перемещения.

В статье приведено описание методики динамических испытаний автомобильных пневматических регуляторов тормозных сил с целью их оперативной диагностики на основе компьютерного комплекса. Приведено описание компьютерного комплекса, обеспечивающего тестовые динамические режимы наполнения и опорожнения пневмоаппарата рабочим телом. Приведены статистические характеристики параметров рабочих процессов регулятора тормозных сил, которые влияют на его быстродействие и изменяются в процессе эксплуатации. Приведены результаты исследования влияния силы трения поршня регулятора тормозных сил на форму его фазовых динамических характеристик, а также на его быстродействие в режиме наполнения и опорожнения рабочим телом. Уделено внимание стабильности тестовых динамических режимов функционирования регуляторов тормозных сил в составе компьютерного комплекса. Приведено описание работы схем управляющей и измерительной систем комплекса. Показаны результаты испытаний, которые позволяют очень оперативно и эффективно выполнять входной и выходной контроль регулятора тормозных сил, как сходящих с конвейера завода-изготовителя, так и поступающих из участка ремонта.

В реальных условиях движения машинно-тракторных агрегатов происходит по криволинейной траектории. Такая траектория не обусловлена технологическим процессом выполняемой операции и является следствием воздействия различных возмущающих факторов. При этом труд водителя становится более напряженным, качество работы ухудшается, а производительность агрегата падает. Поэтому повышение устойчивости и управляемости агрегата, при криволинейном движении, является актуальной задачей. Цель работы – определить основные характеристики динамического бокового увода шин тракторных колёс. Задача заключается в получении соответствующих аналитических зависимостей, характеризующих суммарный боковой увод шины на сминаемом грунте при наличии буксования ведущего (скольжения ведомого) колеса. В данной работе произведём качественно-теоретический анализ динамического бокового увода тракторных шин. Боковой увод шин применительно к условиям качения тракторных колёс, когда контактный отпечаток скользит относительно опорной поверхности, существенно влияет на динамические показатели трактора, точность его движения и производительность. Такие показатели агрегата в движении рыскания, как устойчивость, манёвренность, чувствительность к возмущающим воздействиям существенно зависит от динамического увода шин.

Классическое управление ракетоносителем осуществляется с помощью рулевого агрегата жидкостного ракетного двигателя, который, изменяя вектор тяги в одной плоскости, корректирует отклонения ракеты-носителя от расчетной траектории полета. В качестве рулевого агрегата используется рулевая машина с системой рычажных механизмов с демпфером, преобразующим вращательное движение вала рулевой машины в угловое движение сопла рулевого агрегата. В данной работе предлагается использование подобного рулевого агрегата, в качестве базового для пространственного ориентирования ракетоносителя, с изменением подшипников рулевого агрегата и узла подвески сопла на сферические подшипники. Приведена математическая векторная модель, разработанная для получения потребных углов отклонения рулевых машин от необходимых углов и траектории изменения вектора тяги сопла. Также, приведены варианты конструктивного исполнения предлагаемой системы управления рулевым агрегатом

В статье автор рассматривает исследование, напряженного состояния гака для спускоподъемного устройства маломерных судов, представляющего собой механизм захвата грузоподъемного кольца. Исследование проводится методом конечных элементов с учетом контактного взаимодействия деталей и узлов гака, а также физической нелинейности материала. Для нормирования характеристик напряженного состояния гака автор обращается к требованиям Правил Российского Морского Регистра Судоходства. Автор акцентирует внимание на необходимости импортозамещения в области производства устройств для подъема вспомогательных плавучих средств судов и кораблей. Автором на основании результатов исследования делается вывод о том, что запас прочности гака соответствует требованиям Правил Российского Морского Регистра Судоходства. В заключении автор акцентирует внимание на необходимости учета контактного взаимодействия.

В данной работе рассматриваются методы машинного обучения и численного моделирования для анализа подводных сигналов, возникающих в результате механических воздействий. В ходе исследования был применен метод конечных элементов для создания точной математической модели, описывающей поведение подводного кабеля под влиянием различных внешних факторов. Для численного моделирования использовался программный комплекс COMSOL Multiphysics. В результате моделирования были получены сигналы вибрационных колебаний, которые затем были использованы для более детального анализа. Для исследования сигналов использовался метод опорных векторов, представляющий собой мощный инструмент для обработки данных, особенно в контексте анализа изображений. В результате был проведен эксперимент по классификации изображений вибрационных сигналов с применением метода опорных векторов, который продемонстрировал высокую степень точности в распознавании сигналов. Полученные результаты свидетельствуют о том, что разработанный алгоритм может использоваться для мониторинга и анализа состояния подводной кабельной инфраструктуры.

В работе рассматривается динамика движения тела, движущегося вдоль упругой балки. Целью работы является математическое моделирование динамики системы «твердое тело – упругая балка» с учетом силового взаимодействия указанных тел в двух точках соприкосновения. На основе теории балок Эйлера– Бернулли и общих теорем динамики построены уравнения движения системы «твердое тело – упругая балка» в частных производных. С помощью метода Бубнова–Галёркина получено обыкновенные дифференциальные уравнения для весовых коэффициентов приближенного решения уравнения в частных производных. По результатам численного интегрирования уравнений получены зависимости прогиба и угла поворота поперечного сечения упругой балки от времени. В отличие от ранее используемых, разработанная модель позволяет учесть влияние силового воздействия подвижного твердого тела на изгиб упругой балки. Результаты работы могут быть использованы при проектировании и изготовлении новых транспортных систем.

Исследование посвящено оценке, формированию и коррекции динамических состояний технических объектов с расчетными схемами в виде механических колебательных систем в условиях малых вынужденных колебаний. Основная цель – разработка математических моделей вибрационных испытаний методом многоточечных вибрационных возбуждений. Используются методы теории колебаний, теоретической механики, теории автоматического управления. Основой построения математических моделей служит структурный подход, в рамках которого механической колебательной системе сопоставляется эквивалентная в динамическом отношении структурная схема системы автоматического управления. Применяются передаточные функции для оценки, формирования и коррекции динамических состояний. Разработан подход построения испытательных стендов с многоточечным вибрационным возбуждением. Показано, что одним из режимов вибрационного возбуждения является динамическое состояние, когда испытуемый технический объект служит динамическим гасителем колебаний, а система вибрационных возбудителей колебаний работает в режиме динамического гашения.

В рамках данной работы ставится задача моделирования протеза ноги ниже колена с пружинной системой сгиба отдельных частей: предплюсна, плюсна, фаланги. Рассматривается конструкция протеза ниже колена с системой, оказывающей помощь при ходьбе с помощью пружин, позволяющей пользователю осуществлять ходьбу идентичной человеческой походке и сглаживать переходы между движениями предплюсны, плюсны и фаланг. Протез имеет возможность сгибаться в районе соединения фаланг пальцев, что позволяет пользователю быстрее привыкнуть к изделию. Результаты компьютерного моделирования конструкции протеза в САПР Solidworks показали, что жесткость конструкции при нагружении статической вертикальной силой равной 488 Н будет равна 65,5 кН/м. По результатам расчета динамики стопы предельное значение осевой жесткости пружин составляет 70 кН/м. В качестве одних из возможных материалов для изготовления пружин предплюсны и фаланг протеза могут быть использованы сталь 35Г2, 40Г2 и др. Указанные материалы обеспечивают стабильную работу протеза ноги. Полученная модель стопы может быть использована при проектировании биопротезов медицинского назначения.
Статистика статьи
Статистика просмотров за 2025 год.
Издательство
- Издательство
- НИЦ МС
- Регион
- Россия, Санкт-Петербург
- Почтовый адрес
- г Санкт-Петербург, Приморский пр-кт
- Юр. адрес
- г Санкт-Петербург, Приморский пр-кт
- ФИО
- Жукова Елена Валерьевна (Индивидуальный предприниматель)
- Контактный телефон
- +7 (___) _______
- Сайт
- http://srcms.ru/