
Статьи в выпуске: 11

В статье рассматривается вопрос о необходимости проведения постоянной диагностики металлоконструкций автосамосвалов с использованием дистанционных методов контроля. Скорость развития дефектов зависит от большого количества факторов, например, от качества дорог, квалификации водителя, квалификации сварщика, пробега автомобиля, температуры окружающей среды и т. д. Рассчитать время, которое автосамосвал может проработать в безотказном режиме, с учетом указанных факторов довольно сложно. Поэтому, для уменьшения количества отказов, необходимо переходить к постоянной диагностике на основе дистанционных методов контроля, что позволит перейти от ремонта по пробегу, к ремонту по техническому состоянию. В статье приводятся результаты диагностики и ремонта, выполненные на участке рамы автосамосвала, с помощью акустико-эмиссионного метода контроля.

В статье рассмотрен метод быстрой оценки технического состояния станков с ЧПУ, который позволит эффективно и своевременно провести техническое обслуживание или текущий ремонт металлорежущего оборудования и, следовательно, повысит долговечность его работы. Предлагаемое использование экспертной информационно-измерительной системы на основе базы знаний и продукционных моделей позволит определить место возникновения погрешности без разборки оборудования, что в конечном итоге повышает эффективность и своевременность технического обслуживания.

В высокотемпературных процессах, связанных с литьем цветных и черных металлов, использование высокоогнеупорных порошков становится критическим аспектом для достижения качественности конечного продукта. Эти порошки, обладая способностью сохранять свои физико-химические свойства при экстремальных температурах, обеспечивают надежную защиту форм от температуры металлических расплавов, предотвращая тем самым налипание и прилипание сплавов к формовочной оболочке.

Работа посвящена высокотемпературным трибологическим испытаниям углеродуглеродного материала “Арголон-2D”, модифицированного теллуром. При температуре +500°С, нагрузке 1,0 МПа, скорости 0,16 м/с коэффициент трения материала “Арголон-2D”+Te меньше в 1,4 раза, чем у образцов “Арголон-2D”. В диапазоне температуры +500…+800°С коэффициент трения модифицированного материала “Арголон-2D”+Te при нагрузке 1,0МПа и скорости 0,05 и 0,16 м/с сохраняет низкое значение и находится в диапазоне 0,24…0,29.

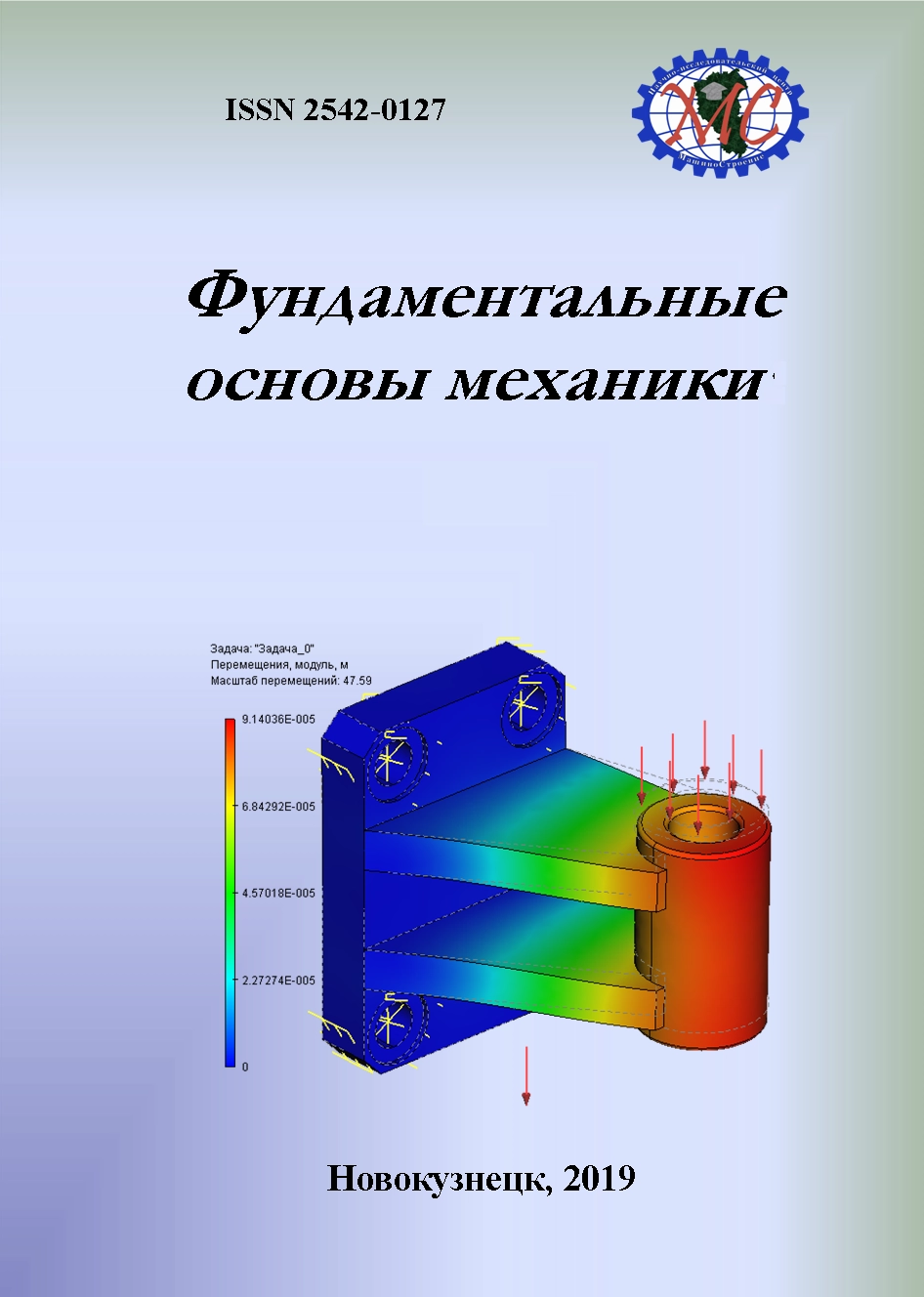
В статье рассматривается методика расчетного анализа напряженнодеформированного состояния и оценка прочности несущих элементов подвески стеклопакета, изготовленного для монтажа на объекте, на основе использования численного моделирования методом конечных элементов и решения задачи механики упругого деформирования. Результаты численного расчета НДС показали, что уровень интенсивности напряжений в несущем элементе подвески стеклопакета типа внутренней коробчатой стойки превышает допустимых значений для используемого материала стойки и требует дополнительных исследований.

В статье рассматривается методика расчетного анализа напряженнодеформированного состояния и прочности театральной лестницы, разработанной для постановки в пьесе и изготовленной из металлопроката, на основе использования вычислительного моделирования методом конечных элементов и решения задачи механики упругого деформирования. Результаты численного расчета НДС показали, что уровень расчетных напряжений имеет двойной запас по прочности материала лестницы, обеспечивая ее надежную эксплуатацию.

В работе приводятся результаты исследований по определению стойкости стали 20ГЛ, подвергнутой различным режимам термической обработки, к коррозионной стойкости по механизму сульфидного коррозионного растрескивания под напряжением в среде сероводорода с разной агрессивностью. Показано, что оптимальным режимом термической обработки для стали 20ГЛ можно рекомендовать проведение нормализации при Т = 920°С с выдержкой в течение 2 часов и последующим охлаждением на воздухе.

Манипуляционные роботы широко применяются для перемещения предметов производства, а также выполнения различных технологических операций. Перемещения выполняются в контейнеры или в специализированные устройства для дальнейшей обработки. Так как положение объектов и количество заранее не известны, то для получения информации о внешней среде используется видеокамера. Для задания объектов, с которыми предстоит оперировать, используются заранее подготовленные шаблоны. Для выполнения поиска реализован ряд методов. В результате поиска определяются координаты объектов, соответствующих заданному шаблону. Это позволяет подготовить систему команд для манипуляционного робота по захвату найденного объекта и выполнения с ним необходимых операций.

В статье рассматривается составление и обоснование условия равновесия твердого тела под действием пространственной системы сил относительно тетраэдра (условие Аппеля) с учетом особенностей практического приложения к силовому расчету станочных приспособлений. Приводится поэтапное разъяснение обоснования условий равновесия. Отмечается соответствие между условием Аппеля и расчетной схемой простейшего зажима.

В статье проведен динамический анализ механической системы, состоящей из двух взаимодействующих материальных тел, связанных прямолинейным жестким стержнем, концы которого закреплены на этих телах с помощью идеальных шарниров. Механическая система имеет пять степеней свободы. Ее тела по отношению к их центру масс, а также по отношению друг к другу совершают сложное переносно-относительное поступательное движение по траекториям в виде окружностей, которое формирует поле относительных сил инерции этих тел. Исходя из аксиомы связей для сил инерции и принципа Д’Аламбера записано уравнение движения каждого из тел механической системы в поле их относительных сил инерции в отдельности. Показано, что время в собственных системах отсчета взаимодействующих тел по отношению ко времени в системе отсчета их центра масс протекает по-разному и зависит от масс этих тел. Время в системе отсчета центра масс этих тел по отношению ко времени в любой инерциальной системе отсчета абсолютно.

В статье на простых примерах рассматривается влияние различных видов связей на движение материальной точки. Выясняется в каких случаях появляется динамическая составляющая реакции связи, действиям какой силы на материальную точку она обусловлена, и как эта сила влияет на относительное движение материальной точки, выявляются причины, по которым в каждом конкретном случае происходит абсолютизация относительного движения. Кроме того, выясняется, как динамическая составляющая реакции связи влияет на абсолютное движение материальной точки и почему абсолютное движение материальной точки со связями можно рассматриваться как сложное движение точки.